6주차 목표
- Stereo camera를 이용하여 사물의 거리를 측정하는 알고리즘에 대한 논문 읽기
회고
0. Block matching algorithms
- SAD(Sum of Absolute Differences)
- SSD(Sum of Squared Differences)
- NCC(Normalized Cross Correlation)
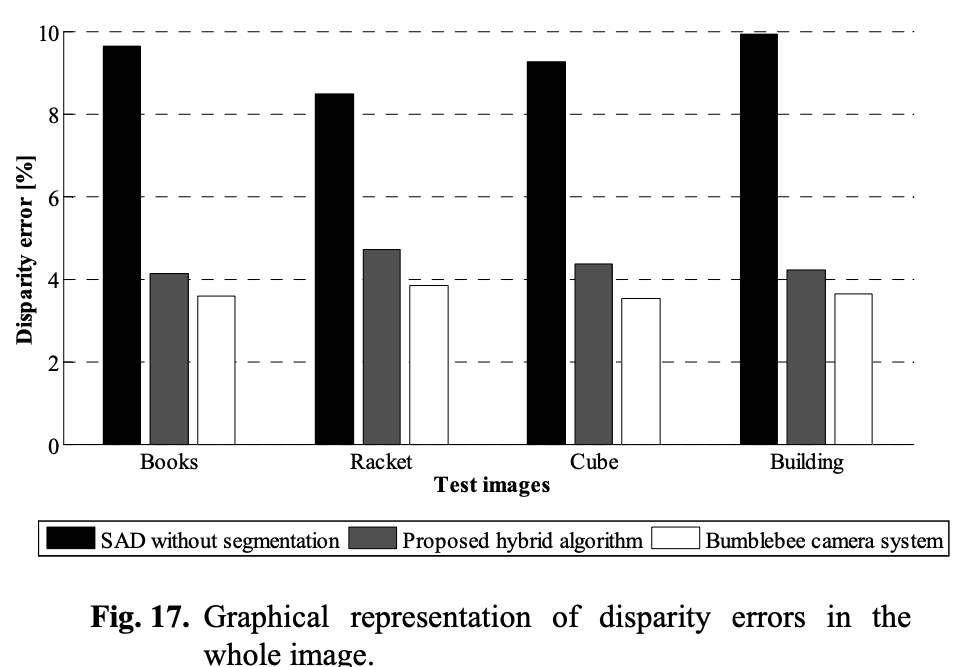
1. Improved Depth Map Estimation from Stereo Images Based on Hybrid Method
https://core.ac.uk/download/pdf/30311779.pdf
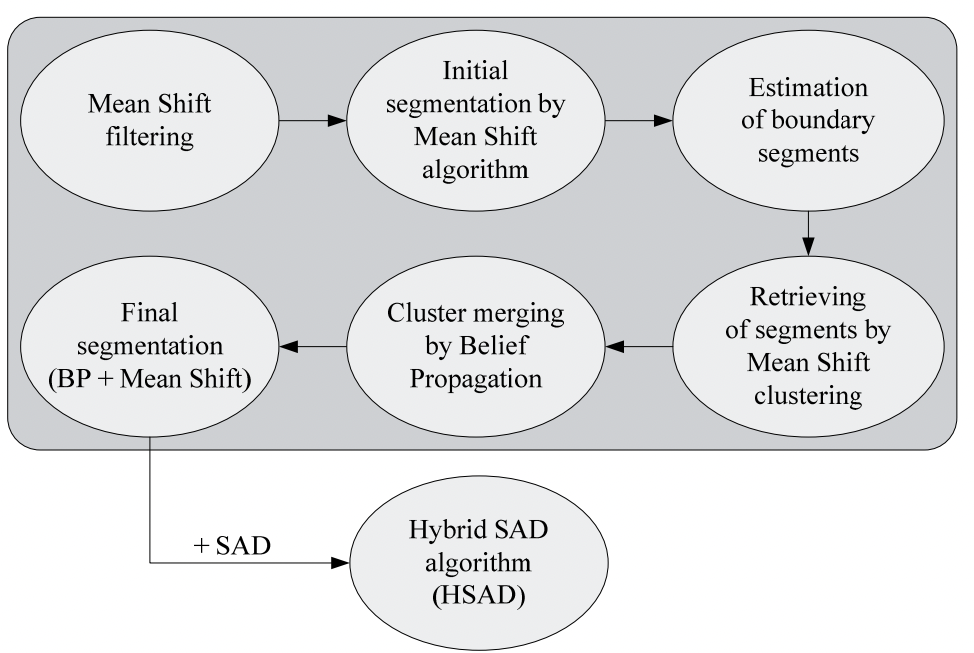
- Use SAD + Hybrid segmentation (Mean shift segmentation + Belief propagation)
-
Mean shift segmentation: A method that moves in the most data-intensive direction around it and finally around the distribution of the entire data
- Find the data coming within radius r from the current location: (x1,y1), (x2,y2), …, (xn,yn)
- Move the current position to the coordinates of their center of gravity (mx/n, my/n).
- Repeat steps 1 and 2 until there is little change in position, that is, until convergence.
-
Belief propagation: Method for estimating the value of another node when given a value or probability distribution for some nodes in a graphical model
-
-
It has lower disparity error compare with SAD
2. Performance Improvement of Distance Estimation based on the Stereo Camera
https://dcollection.snu.ac.kr/public_resource/pdf/000000018306_20220727055238.pdf
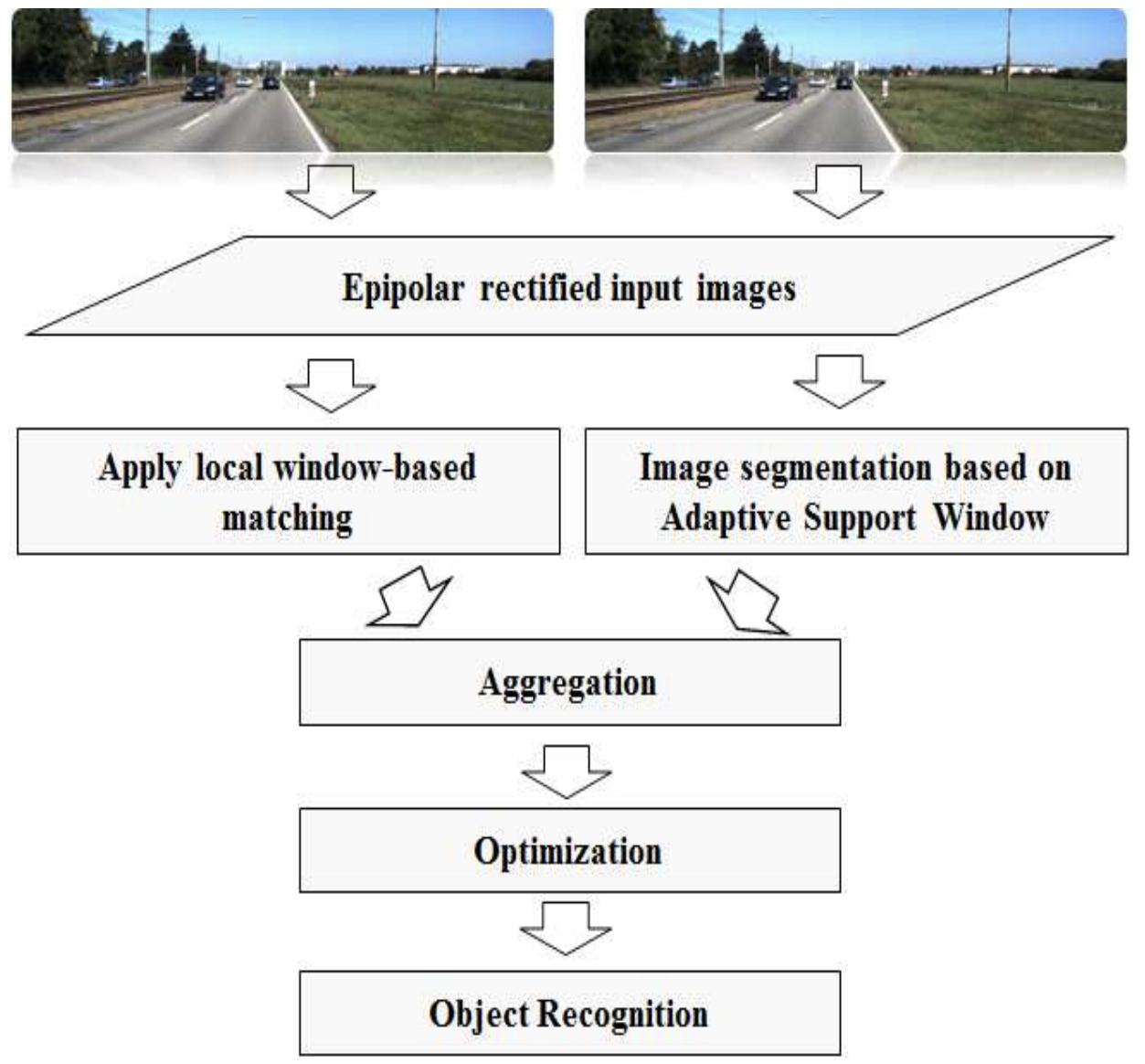
- In optimization step, it uses Semi-Global Method.
- Local Method: Do optimization using pixels in a certain Support Window.
- Global Method: This defines the energy function and takes into account the cost of all pixels when obtaining the dissipation value of one pixel (ex. Belief Propagation, Graph-Cut)
- Semi-Global Method: A method of defining adjacent regions by considering the distance between regions and the difference in disparity between regions, and doing cooperative optimization of adjacent regions.
-
Result
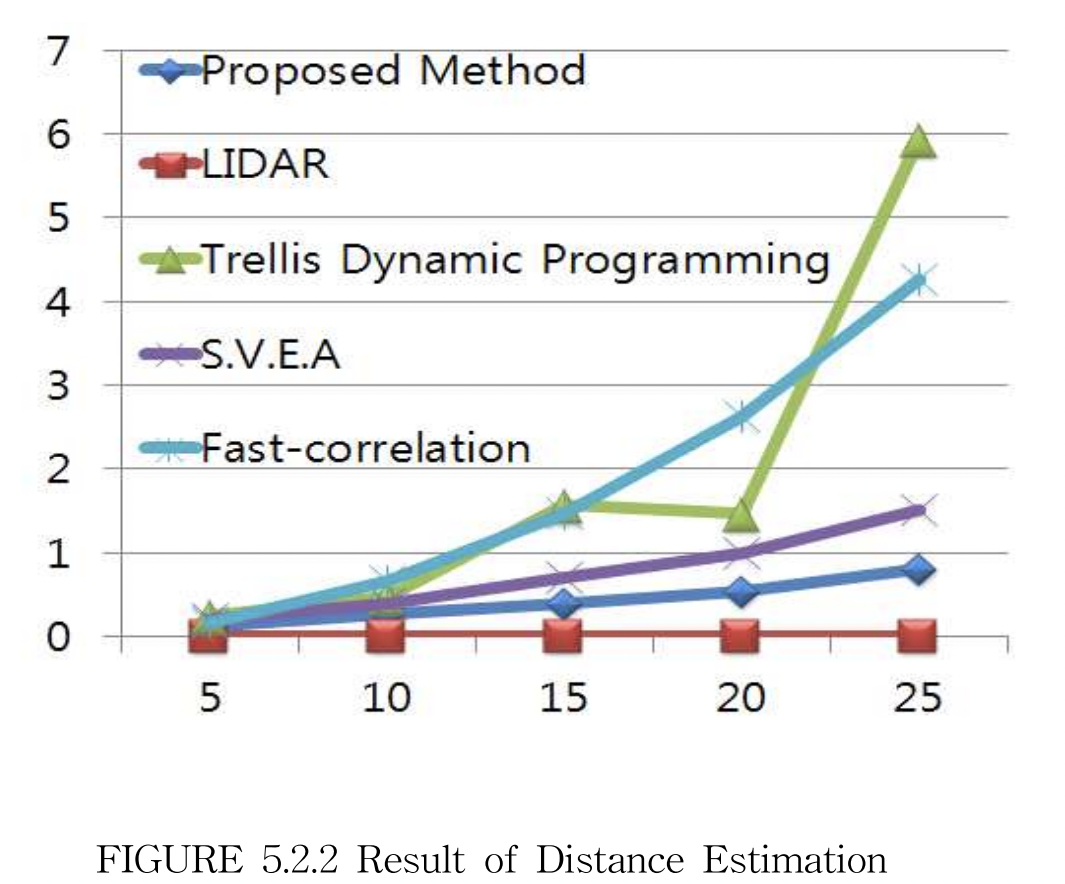
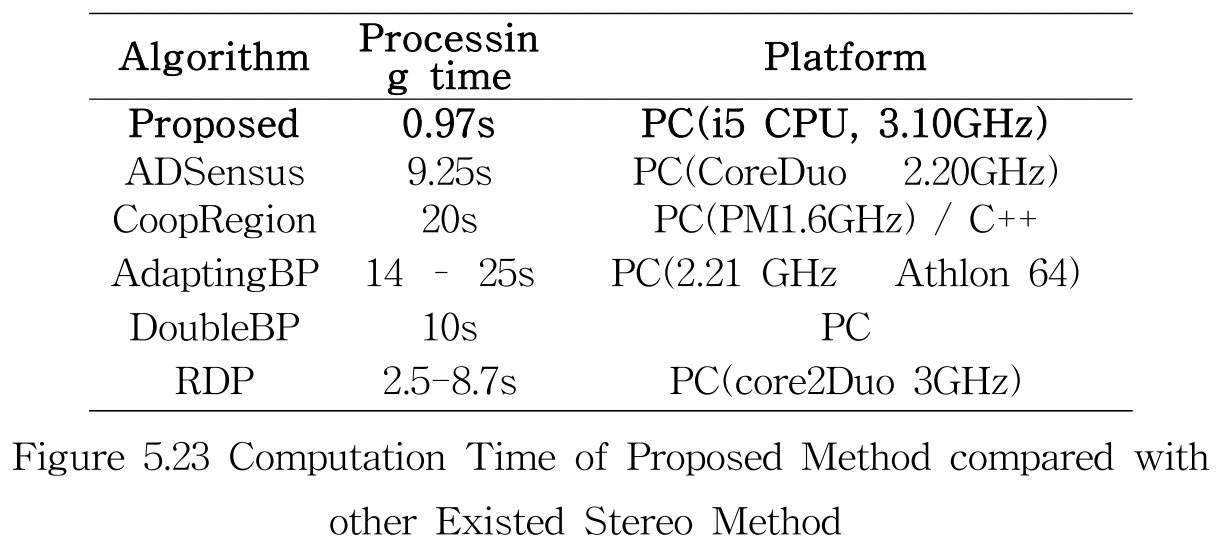
- The method proposed in the paper seems to take a very short time.
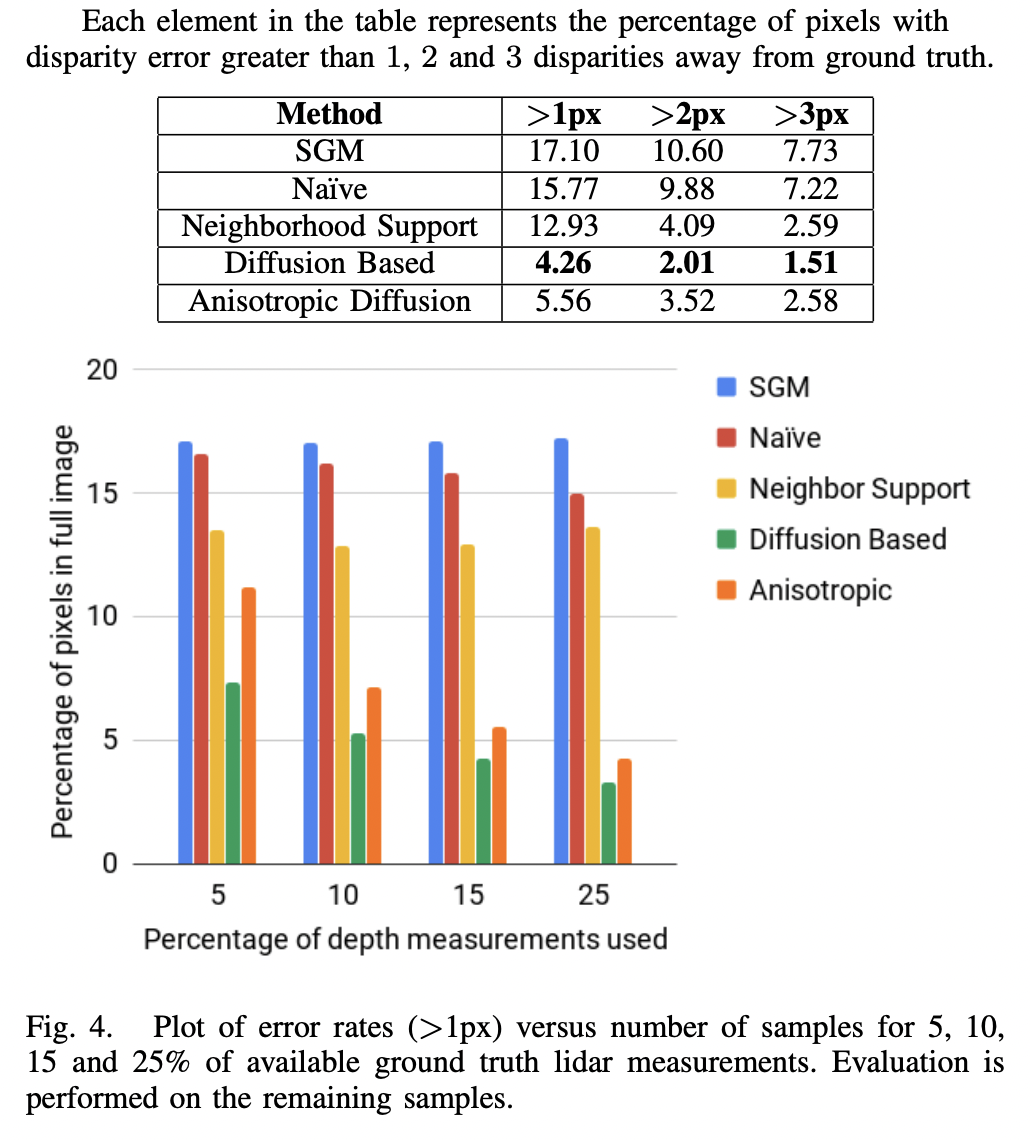
3. Real Time Dense Depth Estimation by Fusing Stereo with Sparse Depth Measurements
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8794023
-
Paper interpolate the sparse depth points from the range sensor and then use this information during the update step. Paper restrict this interpolation to regions near valid range measurements as points further away may not be part of the same surface
-
Result